เข้าใจลึกซึ้งใน Physical AI ของ Huang Renxun: ทำไมโอกาสใน Crypto ถึงซ่อนอยู่ใน “มุมแคบ” ด้วย?
ในเวทีเวิลด์ Economic Forum ฮวังเหรินฉุนพูดอะไรบ้าง?
ในแง่ผิวเผิน เขากำลังโปรโมตหุ่นยนต์ แต่ในความเป็นจริง เขากำลังดำเนินการปฏิวัติ “ตัวเอง” อย่างกล้าหาญ เขาจบยุคเก่าแห่ง “การสะสมการ์ดจอ” ด้วยคำพูดเดียว แต่กลับคาดการณ์ให้โอกาสเข้าร่วม Crypto ได้อย่างหายาก?
เมื่อวานนี้ ในเวทีเวิลด์ Economic Forum ฮวังเหรินฉุนชี้ให้เห็นว่า ชั้นของการใช้งปัญญาประดิษฐ์กำลังระเบิด ความต้องการพลังคำนวณจะเปลี่ยนจาก “การฝึก” ไปสู่ “การอนุมาน” และ “Physical AI(ปัญญาประดิษฐ์เชิงกายภาพ)”
นี่น่าสนใจมาก
NVIDIA ในฐานะผู้ชนะรายใหญ่ในยุค AI 1.0 “การแข่งขันอาวุธพลังคำนวณ” ตอนนี้ประกาศเปลี่ยนทิศทางไปสู่ “การอนุมาน” และ “Physical AI” ซึ่งส่งสัญญาณตรงไปตรงมามาก: ยุคที่พึ่งพาการสะสมการ์ดจอเพื่อฝึกโมเดลขนาดใหญ่นั้นได้ผ่านไปแล้ว ในอนาคต การแข่งขัน AI จะเน้นไปที่ “การใช้งาน” ซึ่งเป็นการลงมือทำตามสถานการณ์จริง
พูดอีกอย่างคือ Physical AI เป็นช่วงครึ่งหลังของ Generative AI
เพราะ LLM ได้อ่านข้อมูลจากอินเทอร์เน็ตที่สะสมมาหลายสิบปีของมนุษย์แล้ว แต่ยังไม่เข้าใจวิธีเปิดฝาขวดเหมือนมนุษย์ Physical AI จึงเป็นการแก้ปัญหา “ความรู้และการปฏิบัติ” นอกเหนือจาก AI เชิงปัญญา
เพราะว่า Physical AI ไม่สามารถพึ่งพา “สะพานสะท้อนยาว” ของเซิร์ฟเวอร์คลาวด์ระยะไกลได้ง่ายๆ logic ก็ง่ายมาก ถ้าให้ ChatGPT สร้างข้อความช้าหนึ่งวินาที คุณอาจรู้สึกว่าช้า แต่ถ้าหุ่นยนต์สองเท้าช้าหนึ่งวินาทีจากการดีเลย์ของเครือข่าย มันอาจจะล้มลงจากบันไดก็ได้
แต่ถึงแม้ว่า Physical AI จะดูเป็นการต่อยอดของ AI สร้างสรรค์ แต่จริงๆ แล้วเผชิญกับสามหัวข้อใหม่ที่แตกต่างกันอย่างสิ้นเชิง:
1) ปัญญาเชิงพื้นที่: ทำให้ AI เข้าใจโลกสามมิติ
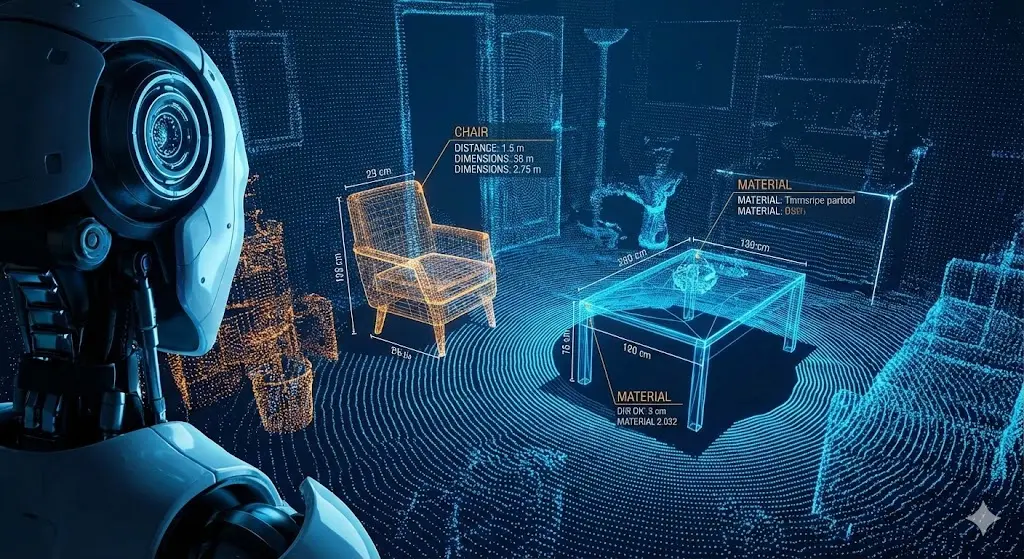
ศาสตราจารย์李飞飞 เคยเสนอว่า ปัญญาเชิงพื้นที่คือดาวเหนือถัดไปของวิวัฒนาการ AI หุ่นยนต์ต้อง “เข้าใจ” สภาพแวดล้อมก่อน การรู้จัก “นี่คือเก้าอี้” ไม่เพียงพอ แต่ต้องเข้าใจ “ตำแหน่ง โครงสร้าง และแรงที่ต้องใช้ในการเคลื่อนย้ายเก้าอี้นี้ในสามมิติ”
สิ่งนี้ต้องการข้อมูลสภาพแวดล้อม 3D ขนาดใหญ่แบบเรียลไทม์ ครอบคลุมทุกมุมในร่มและกลางแจ้ง
2) สนามฝึกเสมือน: ให้ AI ฝึกผิดพลาดในโลกจำลอง
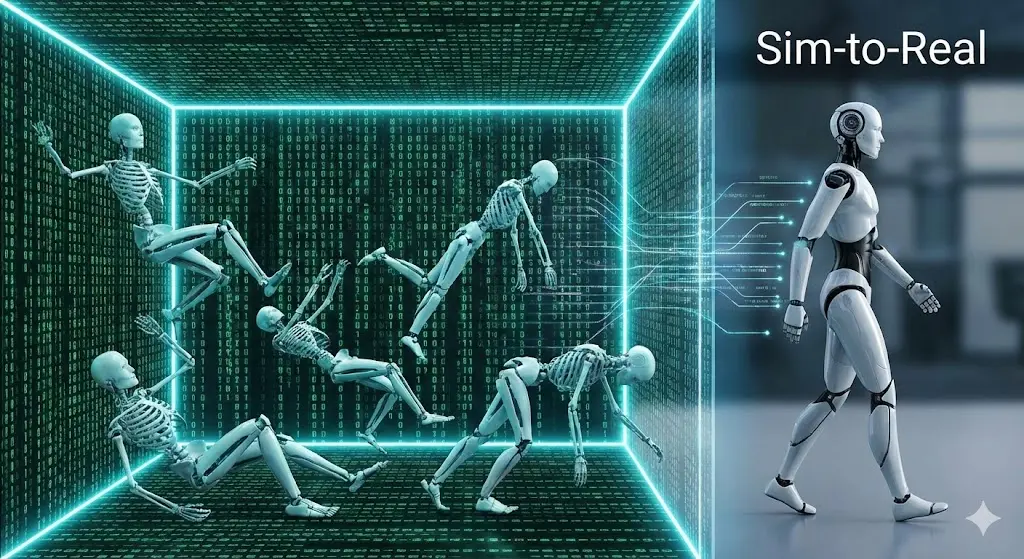
Omniverse ที่ฮวังเหรินฉุนพูดถึงจริงๆ แล้วคือ “สนามฝึกเสมือน” หุ่นยนต์ก่อนเข้าสู่โลกจริง ต้องฝึก “ล้ม 10,000 ครั้ง” ในสภาพแวดล้อมเสมือนเพื่อเรียนรู้การเดิน กระบวนการนี้เรียกว่า Sim-to-Real จากการจำลองสู่ความเป็นจริง หากให้หุ่นยนต์ลองผิดลองถูกในโลกจริงเลย ต้นทุนความเสียหายของฮาร์ดแวร์จะเป็นตัวเลขมหาศาล
กระบวนการนี้ ต้องการความสามารถของเอนจินฟิสิกส์และการเรนเดอร์แบบสมบูรณ์แบบในระดับสูง
3) ผิวหนังอิเล็กทรอนิกส์: “ข้อมูลสัมผัส” เป็นสมบัติที่รอการขุด
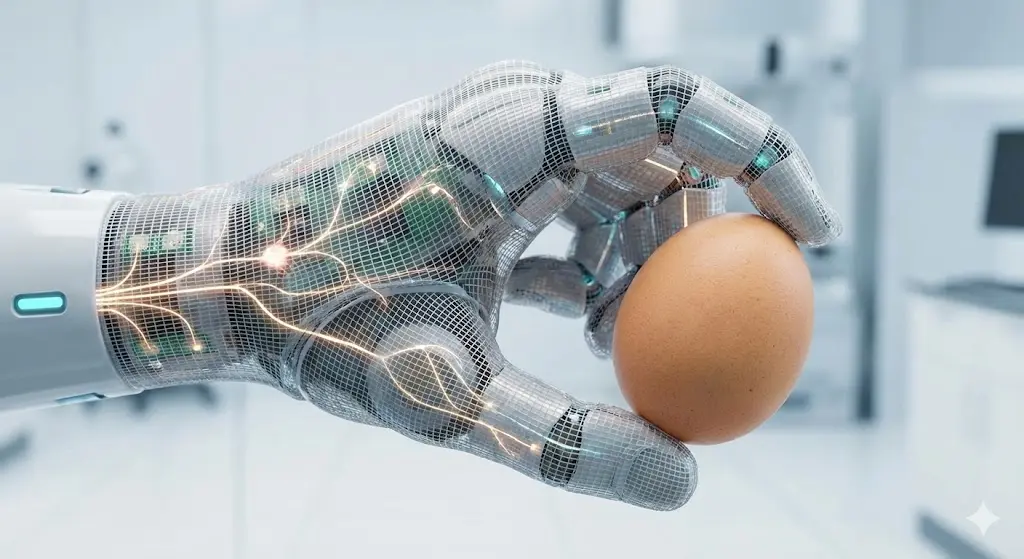
เพื่อให้ Physical AI มี “ความรู้สึก” ต้องใช้ผิวหนังอิเล็กทรอนิกส์เพื่อรับรู้ อุณหภูมิ ความกดดัน และพื้นผิว “ข้อมูลสัมผัส” เหล่านี้เป็นทรัพย์สินใหม่ที่ไม่เคยถูกเก็บรวบรวมในระดับใหญ่ก่อนหน้านี้ อาจต้องใช้เซ็นเซอร์จำนวนมากในการเก็บข้อมูล เช่นเดียวกับที่บริษัท Ensuring ใน CES แสดง “ผิวหนังแบบผลิตจำนวนมาก” ที่ฝังเซ็นเซอร์ 1,956 ตัวบนมือ จึงสามารถให้หุ่นยนต์ตอกไข่ได้อย่างมหัศจรรย์
ข้อมูลสัมผัสเหล่านี้เป็นทรัพย์สินใหม่ที่ไม่เคยถูกเก็บรวบรวมในระดับใหญ่ก่อนหน้านี้
หลังจากอ่านจบ คุณจะรู้สึกว่า การเกิดขึ้นของแนวคิด Physical AI เปิดโอกาสให้กับอุปกรณ์สวมใส่และหุ่นยนต์รูปแบบมนุษย์ในด้านฮาร์ดแวร์มากมาย ที่สำคัญคือ สิ่งเหล่านี้ในไม่กี่ปีก่อนถูกวิจารณ์ว่าเป็น “ของเล่นขนาดใหญ่”
จริงๆ แล้ว ผมอยากบอกว่า ในแผนที่ใหม่ของ Physical AI โอกาสในการเติมเต็มระบบนิเวศของเส้นทาง Crypto ก็มีอย่างยอดเยี่ยม ผมขอยกตัวอย่างง่ายๆ:
-
ยักษ์ใหญ่ด้าน AI สามารถส่งรถถ่ายภาพถนนในเมืองทุกเส้นทาง แต่ไม่สามารถเก็บข้อมูลในซอยในชุมชนและชั้นใต้ดินได้ ด้วยการใช้โทเคนสนับสนุนจากเครือข่าย DePIN เพื่อจูงใจผู้ใช้ทั่วโลกให้ใช้อุปกรณ์พกพาเก็บข้อมูลเหล่านี้ ก็อาจเติมเต็มข้อมูลได้
-
อย่างที่กล่าวไป หุ่นยนต์ไม่สามารถพึ่งพาพลังคำนวณบนคลาวด์ได้ แต่ในระยะสั้น ต้องใช้การคำนวณขอบและความสามารถในการเรนเดอร์แบบกระจายอย่างมาก โดยเฉพาะข้อมูลจำลองสู่ความเป็นจริง การรวมพลังคำนวณจากอุปกรณ์ผู้บริโภคที่ไม่ได้ใช้งานอยู่ มารวมกันและจัดสรร ก็สามารถใช้งานได้
-
“ข้อมูลสัมผัส” นอกจากการใช้เซ็นเซอร์ในระดับใหญ่แล้ว ชื่อเสียงก็ชัดเจนว่าเป็นข้อมูลส่วนตัวอย่างมาก แล้วจะทำอย่างไรให้คนทั่วไปแชร์ข้อมูลเหล่านี้กับบิ๊กเทค AI ได้ แนวทางที่เป็นไปได้คือ ให้ผู้ที่ให้ข้อมูลได้รับสิทธิ์ในข้อมูลและแบ่งปันผลตอบแทน
สรุป:
Physical AI คือช่วงครึ่งหลังของเส้นทาง AI ใน Web2 ที่ฮวังเหรินฉุนประกาศออกมา แล้วเส้นทาง AI ใน Web3 เช่น DePIN, DeAI, DeData ก็ไม่ใช่หรือ? แล้วคุณล่ะคิดว่าอย่างไร?