As AI technology gradually moves from the digital world into the physical world, robotics, autonomous devices, and automation systems are becoming important components of next-generation AI infrastructure. From humanoid robotics to autonomous machines, more AI systems are gaining the ability to perform tasks in real-world environments, drawing greater attention from both capital and technology communities to the robotics economy.
However, the traditional robotics industry has long faced high financing barriers, concentrated capital, and limited liquidity. Robotic equipment is typically part of a capital-intensive sector, with long research and development cycles and high deployment costs. As a result, ordinary users have little direct access to the growth of the robotics industry. RCM was proposed as an attempt to address this problem through Web3 infrastructure.
What Is Robotics Capital Markets
As an on-chain capital coordination mechanism for the robotics economy proposed by XMAQUINA, Robotics Capital Markets (RCM) aims to allow robotic assets and automation infrastructure to be governed, financed, and allocated within open networks.
Traditional capital markets mainly serve stocks, bonds, and corporate financing. RCM, by contrast, attempts to move part of the capital logic of the robotics industry into an on-chain environment. Its core purpose is not simply to “trade robotic assets”, but to build a new collaborative structure around the robotics economy.
RCM typically covers objects such as:
-
Robotic equipment
-
Automation infrastructure
-
Autonomous machines
-
AI-driven hardware systems
-
Physical AI networks
-
Robotics-related treasuries and governance structures
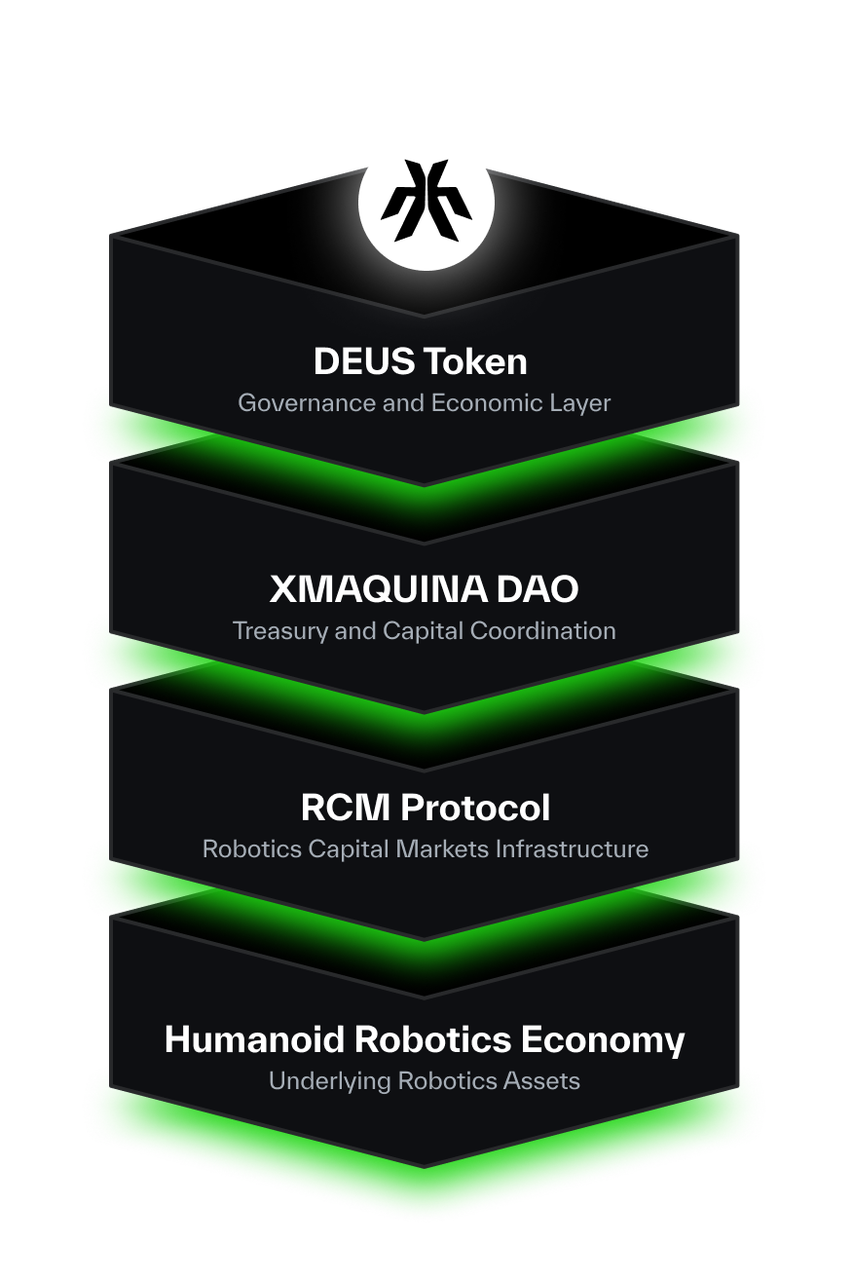
Within the XMAQUINA ecosystem, RCM is regarded as an important module connecting DAO governance, robotic assets, and on-chain capital.
Why the Robotics Industry Needs On-Chain Capital Markets
The robotics industry differs from the traditional internet sector, as its research, development, and operations often require heavier hardware investment and longer-term capital support.
For example:
-
Humanoid robots require complex hardware manufacturing
-
Automation systems need long-term maintenance
-
AI robotics involves significant computing and equipment costs
-
Autonomous machines require continuous upgrades and deployment
The traditional robotics industry usually depends on venture capital, corporate financing, and institutional capital. This model, however, comes with several clear problems:
| Problem |
Impact |
| High financing barriers |
Ordinary users have difficulty participating |
| Low liquidity |
Robotic assets are difficult to trade |
| Capital concentration |
Decision-making power is concentrated among a small number of institutions |
| Limited collaboration efficiency |
Open ecosystems are difficult to form |
RCM attempts to lower participation barriers through on-chain governance and DAO coordination mechanisms, while building a more open capital structure for the robotics economy.
How RCM Brings Robotic Assets On-Chain
Bringing robotic assets on-chain is not as simple as “issuing a token”. Instead, it uses on-chain governance, asset mapping, and capital coordination mechanisms to allow part of the robotics economy’s resources to collaborate within Web3 networks.
RCM usually includes several core components:
DAO Governance Structure
A DAO is used to coordinate governance and decision-making processes within the robotics economy, including treasury management, protocol upgrades, and resource deployment.
In XMAQUINA, DEUS and xDEUS are used for governance participation and voting.
Asset Coordination Mechanism
Robotic assets usually have real-world attributes, so on-chain protocols are needed to establish governance and coordination logic.
This process may include:
-
Asset mapping
-
Revenue coordination
-
Treasury management
-
Capital deployment
-
SubDAO collaboration
On-Chain Financing Mechanism
RCM attempts to build a new financing model for the robotics economy through community governance and an open capital structure.
Compared with traditional private financing, on-chain governance places greater emphasis on community participation and transparent collaboration.
Physical AI Infrastructure
RCM does not focus only on the financial layer. It also pays attention to robotics and AI infrastructure itself.
How Is RCM Different from Traditional RWA
RCM shares some similarities with real-world assets (RWA), because both involve combining real-world resources with on-chain structures.
However, their areas of focus are not exactly the same.
| Dimension |
RCM |
Traditional RWA |
| Core object |
Robotics and Physical AI |
Real estate, bonds, and similar assets |
| Governance model |
DAO-driven |
Financial asset mapping |
| Asset attributes |
Dynamic infrastructure |
Static financial assets |
| Goal |
Machine economy collaboration |
Financial asset liquidity |
| Network structure |
Autonomous networks |
Financial product structures |
Traditional RWA focuses more on representing financial assets on-chain, while RCM places greater emphasis on collaboration, governance, and infrastructure expansion within the robotics economy.
How Is RCM Different from Traditional Robotics Financing Models
The traditional robotics industry usually relies on equity financing, venture capital investment, or corporate capital support.
RCM attempts to build a different collaborative logic through DAOs and on-chain capital structures.
The main differences include:
| Dimension |
RCM |
Traditional Robotics Financing |
| Participation method |
DAO governance |
Institutional investment |
| Capital structure |
Open on-chain network |
Private capital |
| Liquidity |
Relatively high |
Relatively low |
| Governance method |
Community collaboration |
Corporate decision-making |
| Accessibility |
More open |
Higher barriers |
This model does not mean completely replacing traditional financing. Rather, it explores a new way to coordinate capital within the robotics economy.
What Role Does DEUS Play in RCM?
DEUS is the governance token of the XMAQUINA ecosystem and one of the core coordination tools within the RCM structure.
Its main functions include:
Users can stake DEUS to receive xDEUS and then participate further in governance.
This mechanism makes RCM more than a simple asset market. It is a governance network built around the robotics economy.
What Potential Challenges Does RCM Face?
Although RCM offers a new way to think about bringing the robotics economy on-chain, this direction is still at an early stage.
Potential challenges include:
-
Robotic asset valuation is complex
-
Real-world asset governance is difficult
-
The Physical AI industry is not yet mature
-
DAO coordination efficiency remains uncertain
-
Regulatory and compliance frameworks are still developing
In addition, the robotics industry itself has high technical barriers and requires long-term investment, so the development of RCM is closely tied to the maturity of the broader Physical AI industry.
Conclusion
Robotics Capital Markets (RCM) is an on-chain capital market mechanism built around the robotics economy and Physical AI. Through DAOs, tokenization, and on-chain governance, it creates new ways to finance and collaborate around robotic assets and automation infrastructure.
Compared with traditional robotics financing models, RCM places greater emphasis on open participation, community governance, and on-chain capital coordination. Its goal is not only to improve the liquidity of robotic assets, but also to push the machine economy toward open networks.
FAQs
How Is RCM Different from Traditional RWA?
Traditional RWA focuses more on bringing financial assets on-chain, while RCM focuses more on robotic assets, Physical AI, and governance collaboration in the machine economy.
Why Does the Robotics Industry Need On-Chain Capital Markets?
The robotics industry often faces high financing barriers, insufficient liquidity, and capital concentration. On-chain capital markets attempt to provide a more open form of collaboration.
What Role Does DEUS Play in RCM?
DEUS is XMAQUINA’s governance token. It is used for DAO voting, treasury management, and ecosystem resource coordination.
What Is Physical AI?
Physical AI refers to AI systems that can interact with the real world, including robots, autonomous devices, and automated machines.
Is RCM Part of DePIN?
RCM overlaps with DePIN to some extent, but RCM leans more toward robotics capital markets and machine economy governance, while DePIN places greater emphasis on infrastructure networks.